Selected engineering projects in robotics testing, simulation, controls, autonomous systems, and software development.

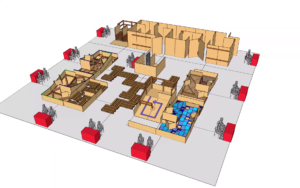
NIST UAS and Robot Test Development
Robotics testing, performance evaluation, and test-apparatus development
Contributed to the development and validation of robot and UAS test methods at NIST for emergency-response evaluation. Work spanned performance measurement, scoring workflows, apparatus and arena design, and standards-oriented documentation.
- Developed and validated robot and UAS performance test methods
- Built scoring, documentation, and evaluation workflows for standards-oriented research
- Designed test apparatuses, arena layouts, and supporting infrastructure

NASA Outliers Lunar Rover Capstone
NASA-affiliated lunar robotics / AFSS sub-team / mission systems engineering
Worked within the AFSS sub-team on a NASA-affiliated lunar rover concept as part of the UMD ENAE 484 capstone. Developed APF-based path planning in MATLAB, performed landing-site evaluation, and supported communications trade studies across a multidisciplinary team.
- Developed APF-based rover navigation and path-planning logic in MATLAB
- Performed landing-site evaluation and scoring using multiple technical criteria
- Contributed to avionics, flight software, and communications trade studies
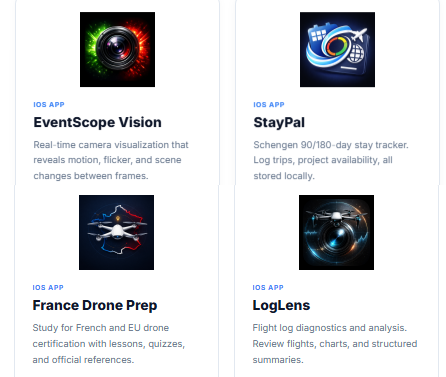
Curiosell Systems, LLC
iOS Apps & Developer Tools
Swift / SwiftUI, computer vision, diagnostics, and privacy-first app development
Founded Curiosell Systems, LLC and designed, built, and shipped iOS apps to the App Store. The work includes computer-vision tools, flight-log diagnostics, EU drone exam prep, Schengen travel tracking, and technical reference utilities. Products are built with focused scope, local-first architecture, and practical use in mind.
- Designed and shipped standalone iOS apps for focused technical and real-world use cases
- Built tools related to computer vision, diagnostics, and structured technical workflows
- Worked across product definition, interface design, implementation, App Store release, and support
- Built with Swift, SwiftUI, and privacy-first local data handling

HL-20 Control Law Design
Flight dynamics, system identification, and Simulink modeling
Developed a longitudinal control-law workflow for the HL-20 lifting body during subsonic approach. Identified elevator-to-pitch-rate dynamics from frequency-response data, fit transfer functions from Bode analysis, and evaluated stability augmentation using MATLAB and Simulink.
- Extracted elevator-to-pitch-rate dynamics from FRF and Bode analysis
- Fit transfer-function models for longitudinal flight dynamics
- Evaluated SAS gain selection and control-law performance in MATLAB/Simulink
CERES Autonomous Drone
Embedded systems, autonomous flight workflow, and DroneKit programming
Self-directed autonomous quadcopter project built on Raspberry Pi and ArduPilot. Included hardware selection, onboard integration, embedded Linux networking, and Python-based autonomous flight logic.
- Built autonomous UAV on Raspberry Pi with ArduPilot
- Implemented autonomous control via Python, DroneKit, and MAVLink
- Set up embedded systems, networking, and field deployment infrastructure
Ludwieg-Tube Hypersonics Experiment
Experimental measurement and image-based data reduction
Applied image-processing and experimental methods to extract aerodynamic data from high-speed video in a hypersonics lab. Performed sphere tracking, measurement extraction, and drag-related data reduction.
- Extracted quantitative measurements from high-speed video data
- Performed drag-related experimental data reduction
- Transformed raw visual data into interpretable aerodynamic results
Wright Flyer CAD and FEA Structural Analysis
Historical aircraft modeling and structural debugging in NX
Built a Siemens NX model of the 1903 Wright Flyer and performed FEA on a redesigned structural member. Included full-model assembly, load application, result debugging, and structural interpretation.
- Modeled Wright Flyer geometry in Siemens NX
- Performed FEA on a redesigned structural element
- Identified and resolved unrealistic deformation from analysis setup errors