Projects
Selected projects in robotics testing, simulation, controls, aerospace analysis, and autonomous systems
NIST UAS and Robot Test Development
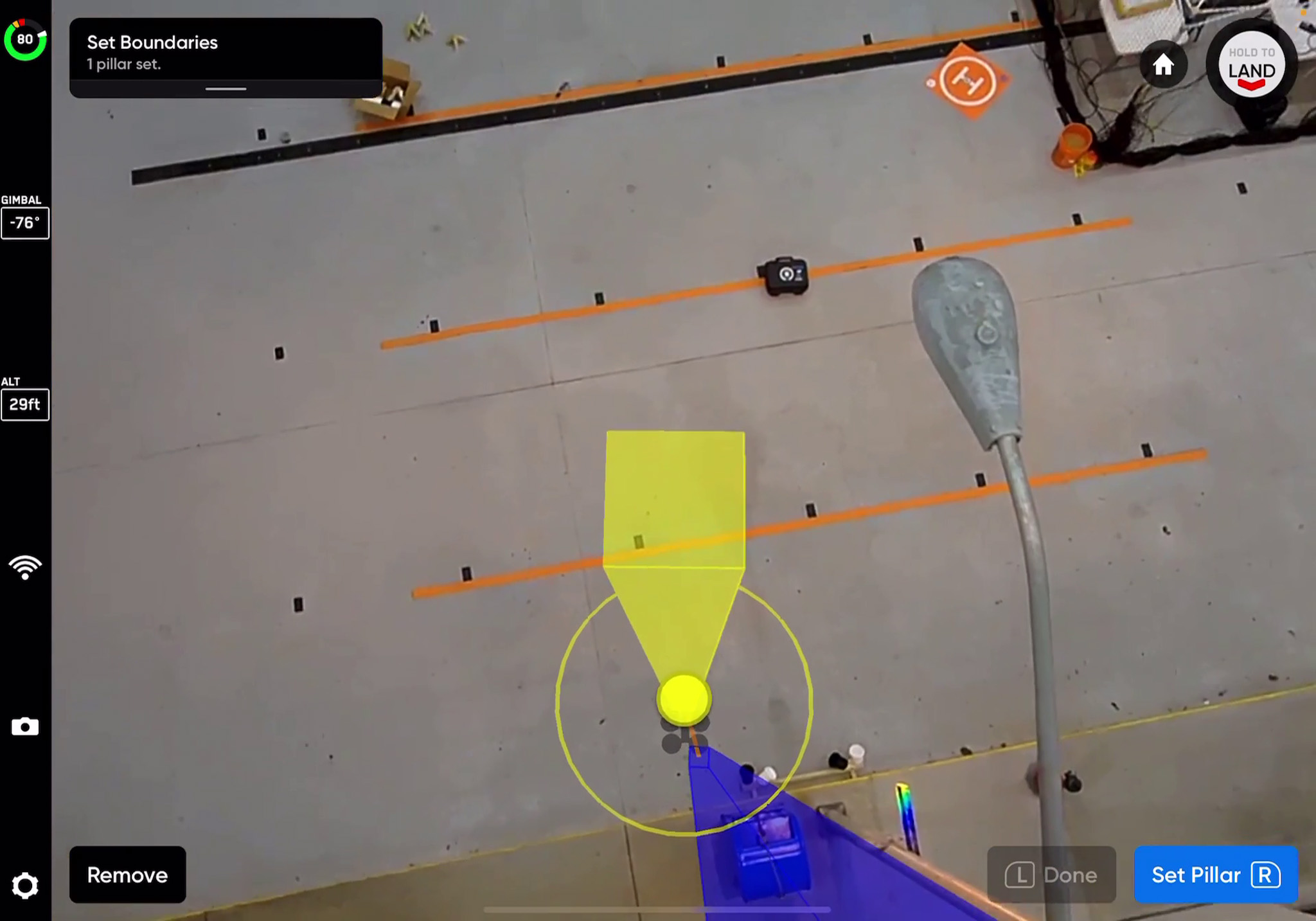
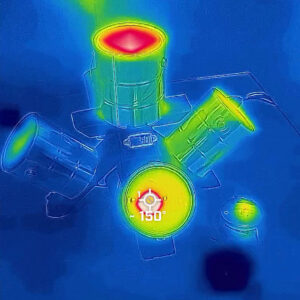
Robotics testing ∗ performance evaluation ∗ test-apparatus development
In a government research setting, I contributed to the development and validation of robot and aerial-system test methods for emergency-response applications. The work included performance measurement, scoring workflows, apparatus and arena design, and supporting documentation for repeatable use in research, training, and standards-oriented settings.
- Unmanned systems performance tests – development and validation
- Supported scoring, documentation, and evaluation workflows in a standards-oriented research environment
- Worked on designing, building, evaluating and validating test apparatuses, arena layouts, and supporting design workflows.
NASA GODDARD SPACE FLIGHT CENTER (GSFC) ∗ O.U.T.L.I.E.R. project cOLLABORATION (CAPSTONE)

cOLLABORATIVE rover navigation IN LUNAR CRATER
mission systems engineering
This capstone project was part of NASA Goddard Space Flight Center’s OUTLIER outreach effort and focused on lunar rover navigation, mission planning, and systems engineering.
My work included Artificial Potential Field-based path-planning development in MATLAB, Gazebo, and RViz. Using LDEM data, I conducted landing-site evaluations, rover communications trade studies, and broader architecture support within a multidisciplinary team.
- Developed APF-based rover navigation and path-planning logic in MATLAB
- Performed landing-site evaluation and scoring using multiple technical criteria
- Supported systems and communications trade work for a NASA GSFC-affiliated capstone project

HL-20 Control Law Design
Flight dynamics ∗ system identification ∗ Simulink modeling
For this project, I developed a longitudinal control-law workflow for NASA’s HL-20 lifting-body concept during subsonic approach and landing. The work centered on identifying elevator-to-pitch-rate dynamics from frequency-response data, curve-fitting transfer functions from Bode relationships, and using MATLAB and Simulink to evaluate reduced-order models and inner-loop stability augmentation.
- Analyzed FRF and Bode data to identify elevator-to-pitch-rate dynamics
- Fit full and truncated transfer-function models for longitudinal behavior
- Used MATLAB and Simulink to support SAS gain selection and control-law evaluation
C.E.R.E.S. Autonomous Drone
Embedded systems ∗ autonomous flight workflow ∗ DroneKit programming
CERES was a self-directed autonomous quadcopter project built around a Raspberry Pi compute platform and ArduPilot/DroneKit tooling. The project included parts selection, onboard integration, embedded Linux and networking setup, and Python-based control logic for autonomous arming and flight tasks.
- Built an autonomous UAV around Raspberry Pi and ArduPilot
- Used Python and DroneKit/MAVLink for autonomous control logic
- Configured Wi-Fi, SSH, and embedded system integration for field use
Ludwieg-Tube Hypersonics Experiment
Experimental measurement ∗ image-based data reduction
In this project, I used image-processing and experimental-analysis methods to extract aerodynamic information from video data in a hypersonics lab setting. The work included sphere tracking, measurement extraction, and drag-related data reduction, turning raw visual data into interpretable engineering results.
- Processed video and image data for quantitative measurement extraction
- Supported drag-related experimental analysis
- Converted raw visual data into usable engineering results
Wright Flyer CAD and FEA Structural Analysis
[Siemens] nx-based aircraft modeling ∗ structural testing
This project involved building a Siemens NX model of the 1903 Wright Flyer and carrying out finite element analysis on a redesigned structural member. The work included full-model assembly, load application, debugging nonphysical results, and interpreting structural behavior after performing FEA on a redesigned structural element.